|
|
|
|
|

- چت IM آنلاین در حال حاضر
گواهی

مبدل فرکانس مبدل گشتاور بالا، اینورتر فرکانس موتور
جزئیات محصول:
پرداخت:
|



توضیحات محصول جزئیات
| شروع گشتاور: | 0.5Hz / 150٪ گشتاور، نسبت سرعت 1: 100، پاسخ پویا <20ms، دقت ثابت ± 0.2٪ | روش ترمز: | با ترمز DC، ترمز قدرت مقاومت |
|---|---|---|---|
| قابلیت اطمینان بالا: | درایو سالم و قابل اطمینان، طراحی مدار حفاظت، طراحی ضد تداخل | حفاظت PCB: | اسپری سه ضد رنگ برای محافظت از مدار چاپی هوشمندانه و کارآمد |
| شروع: | گشتاور بالا شروع، اطمینان از شروع صاف، گشتاور فرکانس پایین، بدون توقف برای پارکینگ | گشتاور: | گشتاور خودکار افزایش جبران |
| برجسته: | vfd motor drive,ac frequency converter |
||
مبدل فرکانس موتور Kinda مورد استفاده در Pistons Hoist
1، ویژگی های سیستم عرفی
(1) سیستم سنتی به مدت طولانی در بار سنگین کار می کند، به جلو و عقب اغلب اجرا می شود، طول عمر
سیستم کوتاه است
(2) نسبت شکست بالا.
(3) راندمان کم، ضریب توان کمتر از 0.8 است.
(4) عملکرد ایمنی بد است.
2، درخواست برای مبدل های فرکانس (VFD)
(1) گشتاور خروجی بزرگ در فرکانس پایین، باید در طول کار به درستی اجرا شود.
(2) ظرفیت بیش از حد بزرگ.
(3) نسبت شکست کم، اجرا پایدار است.
(4) ترمز و مقاومت ترمز باید اضافه شود.
3، نرم افزار واقعی (برج جرثقیل)
3. معرفی سیستم 1
موتور حامل در سیستم 55kW / 380V است، نوع بار گشتاور ثابت، به نظر ویژگی های سنگین خود را،
اینورتر فرکانس باید دو اندازه به عنوان زیر انتخاب شود:

3.2 نمودار سیستم
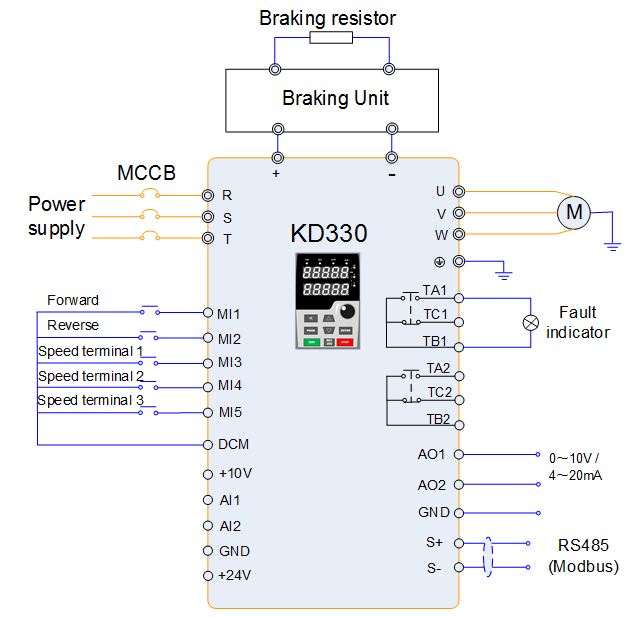
3.3 منطق کنترل
(1) سیستم کنترل برج جرثقیل سیگنال های جلو و عقب را فراهم می کند، در حالی که MI1 و DCM بسته است، برج
جرثقیل عمل می کند به جلو، و در حالی که MI2 و DCM بسته، جرثقیل برج بطور برگشتی اجرا می شود:
(2) سرعت در حال اجرا از جرثقیل با شرایط ON / OFF MI3، MI4 و MI5 کنترل می شود، جزئیات زیر:
| MI5 | MI4 | MI3 | سرعت |
| خاموش | خاموش | خاموش | سرعت 0 (FD-00) |
| خاموش | خاموش | بر | سرعت 1 (FD-01) |
| خاموش | بر | خاموش | سرعت 2 (FD-02) |
| خاموش | بر | بر | سرعت 3 (FD-03) |
| بر | خاموش | خاموش | سرعت 4 (FD-04) |
| بر | خاموش | بر | سرعت 5 (FD-05) |
(3) اینورتر خروجی یک سیگنال خطا در سیستم کنترل جرثقیل، در حالی که خطا اتفاق می افتد، سیستم بلافاصله ترمز می کند و متوقف می شود.
(4) یک خروجی FDT1 (توسط کنترل F8-19 و F8-20) ON / OFF سیگنال وجود دارد، در حالی که اینورتر به تنظیمات می رود
فرکانس، این سیگنال ترمز باز را کنترل می کند، برای جلوگیری از وقوع رویداد معکوس.
3.4 تنظیم خودکار
برای این نوع سیستم کار سنگین، بهتر است از حالت Vector Control (SVC) بدون حسگر استفاده شود، این کار عملکرد گشتاور خروجی را بهتر می کند.
قبل از استفاده از حالت SVC، لطفا autotunning موتور را اجرا کنید، این کار را به صورت زیر انجام دهید:
1) تنظیم F0-02 = 0 (صفحه کلید)، مقدار صحیح F2-01 ~ F2-05 (بر اساس پلاک موتور) را تنظیم کنید؛
2) اگر بار را از موتور برداریم، لطفا تنظیم F2-11 = 2 (تنظیم خودکار چرخش، عملکرد بهتر)، اگر
بار را نمی توان از موتور حذف کرد، لطفا تنظیم F2-11 = 1 (Autotuning استاتیک). صفحه کلید "TUNE" را نمایش می دهد.
3) دکمه RUN را فشار دهید، صبر کنید تا اتمام خودکار به طور خودکار پایان یابد.
4) مقدار F0-01 = 0 را تغییر دهید (کنترل بردار بدون حسگر)
3.5 تنظیم پارامترها
| نه | کدهای تابع | پیش فرض | تنظیم ارزش | توضیح |
| 1 | F0-01 | 2 | 0 | کنترل بردار بدون حسگر |
| 2 | F0-02 | 0 | 1 | شروع / توقف سرآمد خارجی |
| 3 | F0-03 | 1 | 6 | سرعت چند مرحله ای |
| 4 | F0-17 | مدل بستگی دارد | 5 ثانیه | زمان شتاب (قابل تنظیم) |
| 5 | F0-18 | مدل بستگی دارد | 0.5 ثانیه | زمان کاهش (قابل تنظیم) |
| 6 | F3-10 | 150٪ | 200٪ | حد مجاز گشتاور |
| 7 | F5-00 | 1 | 1 | رو به جلو |
| 8 | F5-01 | 2 | 2 | معکوس |
| 9 | F5-02 | 0 | 12 | سرعت گام چند مرحله ای 1 |
| 10 | F5-03 | 0 | 13 | سرعت چند مرحله ای termnial 2 |
| 11 | F5-04 | 0 | 14 | سرعت 3 گام چند مرحله ای |
| 12 | F6-02 | 2 | 2 | گسل خروجی |
| 13 | F6-05 | 0 | 3 | خروجی FDT1 |
| 14 | F8-19 | 50.00Hz | 3.00 هرتز | تنظیم فرکانس خروجی FDT1 |
| 15 | FD-00 | 0.00٪ | 16٪ | سرعت چند مرحله ای 0 (قابل تنظیم) |
| 16 | FD-01 | 0.00٪ | 16٪ | سرعت چند مرحله ای 1 (قابل تنظیم) |
| 17 | FD-02 | 0.00٪ | 30٪ | سرعت چند مرحله ای 2 (قابل تنظیم) |
| 18 | FD-03 | 0.00٪ | 50٪ | سرعت چند مرحله ای 3 (قابل تنظیم) |
| 19 | FD-04 | 0.00٪ | 70٪ | سرعت چند مرحله ای 4 (قابل تنظیم) |
| 20 | FD-05 | 0.00٪ | 82٪ | سرعت چند مرحله ای 5 (قابل تنظیم) |
3. 6 مشکلات در هنگام راه اندازی مواجه است
(1) برای KD330-09000T4، نیاز به اتصال ترمز اضافی واحد و مقاومت ترمز به مصرف دوباره احیاء
انرژی. پارامتر FA-04 آستانه ترمز است، مقدار پیش فرض 135٪ است. ولتاژ اتوبوس DC است
540V، 540 * 135٪ = 729V، بدین معنی که وقتی ولتاژ باس DC به 729V برسد، واحد ترمز شروع به کار می کند.
گاهی اوقات خطای ولتاژ بیش از حد اتفاق می افتد، لطفا مقدار FA-04 را برای جلوگیری از آن کاهش دهید.
(2) از آنجا که فاصله کار برج، بیش از حد طولانی است، در طول در حال اجرا، اینورتر در مدت زمان طولانی در وضعیت بازسازی کار می کند، بنابراین مقاومت ترمز باید بزرگتر انتخاب شود تا عملکرد بهتر شود. در این سیستم، این است
به عنوان 4ohm، 10kW انتخاب کنید.
اطلاعات تماس
Shenzhen Kinda Technology Co., Ltd
تماس با شخص: Tim
تلفن: +8618665335699
ارسال درخواست خود را به طور مستقیم به ما
بیش مبدل فرکانس موتور
-
Kinda 150 HP 110KW موتور فرکانس مبدل سه فاز 380V - 460V
-
فرکانس فرکانس بالا فرکانس 0.5 HP 0.4KW کنترل بردار
-
3 فاز موتور مبدل فرکانس 110KW با کارایی بالا برای ماشین های نساجی
-
موتور رانندگی 37 کیلو وات VFD، فرکانس اکسترودر پلاستیک برای کنترل موتور
-
دستگاه بسته بندی موتور فرکانس مبدل 3 فاز 380V - 460V طراحی مدولار
-
یکپارچهسازی با سیستمعامل سه فاز فرکانس موتور 4KW 5.5KW 7.5KW قابلیت اطمینان بالا